Convolution Kernels#
Introduction and Concept#
The convolution module provides several built-in kernels to cover the most common applications in astronomy. It is also possible to define custom kernels from arrays or combine existing kernels to match specific applications.
Every filter kernel is characterized by its response function. For time series
we speak of an “impulse response function” or for images we call it “point
spread function.” This response function is given for every kernel by a
FittableModel, which is evaluated on a grid with
discretize_model() to obtain a kernel
array, which can be used for discrete convolution with the binned data.
Examples#
1D Kernels#
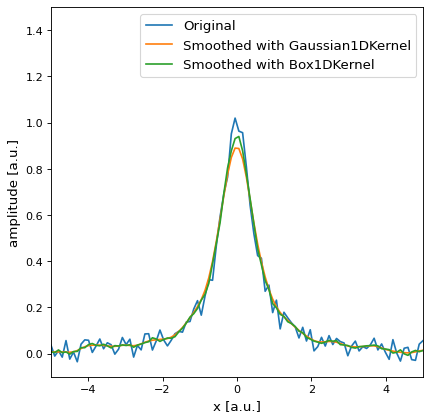
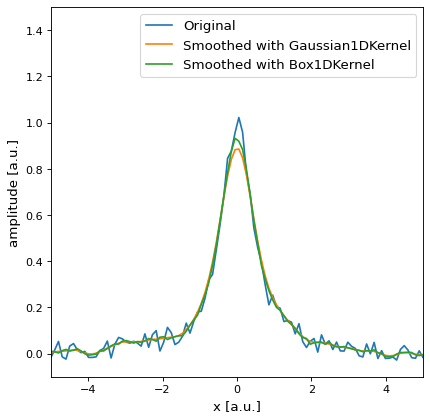
One application of filtering is to smooth noisy data. In this case we consider a noisy Lorentz curve:
>>> import numpy as np
>>> from astropy.modeling.models import Lorentz1D
>>> from astropy.convolution import convolve, Gaussian1DKernel, Box1DKernel
>>> rng = np.random.default_rng()
>>> lorentz = Lorentz1D(1, 0, 1)
>>> x = np.linspace(-5, 5, 100)
>>> data_1D = lorentz(x) + 0.1 * (rng.random(100) - 0.5)
Smoothing the noisy data with a Gaussian1DKernel
with a standard deviation of 2 pixels:
>>> gauss_kernel = Gaussian1DKernel(2)
>>> smoothed_data_gauss = convolve(data_1D, gauss_kernel)
Smoothing the same data with a Box1DKernel of width 5
pixels:
>>> box_kernel = Box1DKernel(5)
>>> smoothed_data_box = convolve(data_1D, box_kernel)
The following plot illustrates the results:
{kind=link}
{kind=link}
Beside the astropy convolution functions
convolve and
convolve_fft, it is also possible to use
the kernels with numpy or scipy convolution by passing the array
attribute. This will be faster in most cases than the astropy convolution,
but will not work properly if NaN values are present in the data.
>>> smoothed = np.convolve(data_1D, box_kernel.array, mode='same')
2D Kernels#
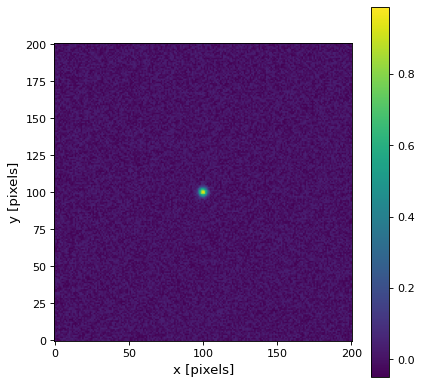
As all 2D kernels are symmetric, it is sufficient to specify the width in one direction. Therefore the use of 2D kernels is basically the same as for 1D kernels. Here we consider a small Gaussian-shaped source of amplitude 1 in the middle of the image and add 10% noise:
>>> import numpy as np
>>> from astropy.convolution import convolve, Gaussian2DKernel, Tophat2DKernel
>>> from astropy.modeling.models import Gaussian2D
>>> gauss = Gaussian2D(1, 0, 0, 3, 3)
>>> # Fake image data including noise
>>> rng = np.random.default_rng()
>>> x = np.arange(-100, 101)
>>> y = np.arange(-100, 101)
>>> x, y = np.meshgrid(x, y)
>>> data_2D = gauss(x, y) + 0.1 * (rng.random((201, 201)) - 0.5)
Smoothing the noisy data with a
Gaussian2DKernel with a standard
deviation of 2 pixels:
>>> gauss_kernel = Gaussian2DKernel(2)
>>> smoothed_data_gauss = convolve(data_2D, gauss_kernel)
Smoothing the noisy data with a
Tophat2DKernel of width 5 pixels:
>>> tophat_kernel = Tophat2DKernel(5)
>>> smoothed_data_tophat = convolve(data_2D, tophat_kernel)
This is what the original image looks like:
{kind=link}
{kind=link}
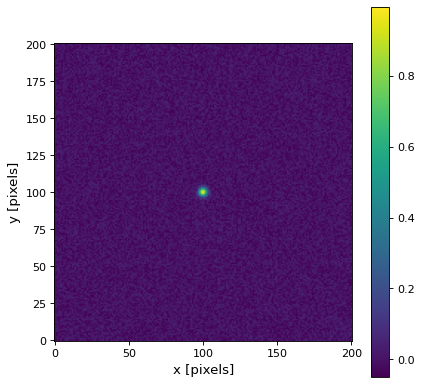
The following plot illustrates the differences between several 2D kernels applied to the simulated data. Note that it has a slightly different color scale compared to the original image.
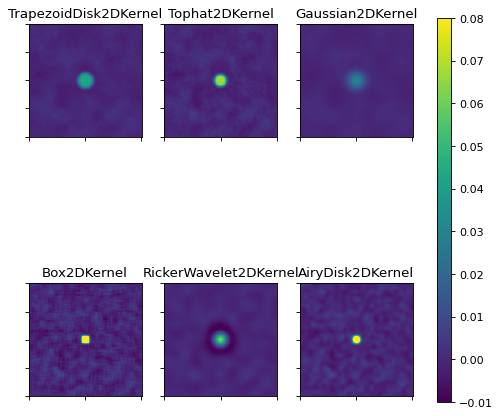{kind=link}
{kind=link}
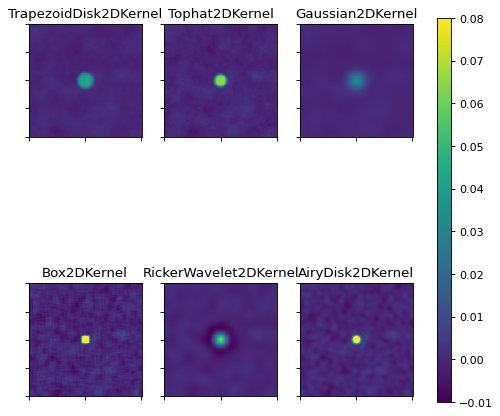
The Gaussian kernel has better smoothing properties compared to the Box and the Top Hat. The Box filter is not isotropic and can produce artifacts (the source appears rectangular). The Ricker Wavelet filter removes noise and slowly varying structures (i.e., background), but produces a negative ring around the source. The best choice for the filter strongly depends on the application.
Available Kernels#
|
2D Airy disk kernel. |
|
1D Box filter kernel. |
|
2D Box filter kernel. |
|
Create filter kernel from list or array. |
|
1D Gaussian filter kernel. |
|
2D Gaussian filter kernel. |
|
1D Ricker wavelet filter kernel (sometimes known as a "Mexican Hat" kernel). |
|
2D Ricker wavelet filter kernel (sometimes known as a "Mexican Hat" kernel). |
|
Create kernel from 1D model. |
|
Create kernel from 2D model. |
|
2D Moffat kernel. |
|
2D Ring filter kernel. |
|
2D Tophat filter kernel. |
|
1D trapezoid kernel. |
|
2D trapezoid kernel. |
Kernel Arithmetic#
Addition and Subtraction#
As convolution is a linear operation, kernels can be added or subtracted from each other. They can also be multiplied with some number.
Examples#
One basic example of subtracting kernels would be the definition of a Difference of Gaussian filter:
>>> from astropy.convolution import Gaussian1DKernel
>>> gauss_1 = Gaussian1DKernel(10)
>>> gauss_2 = Gaussian1DKernel(16)
>>> DoG = gauss_2 - gauss_1
Another application is to convolve faked data with an instrument response function model. For example, if the response function can be described by the weighted sum of two Gaussians:
>>> gauss_1 = Gaussian1DKernel(10)
>>> gauss_2 = Gaussian1DKernel(16)
>>> SoG = 4 * gauss_1 + gauss_2
Most times it will be necessary to normalize the resulting kernel by calling explicitly:
>>> SoG.normalize()
Convolution#
Furthermore, two kernels can be convolved with each other, which is useful when data is filtered with two different kinds of kernels or to create a new, special kernel.
Examples#
To convolve two kernels with each other:
>>> from astropy.convolution import Gaussian1DKernel, convolve
>>> gauss_1 = Gaussian1DKernel(10)
>>> gauss_2 = Gaussian1DKernel(16)
>>> broad_gaussian = convolve(gauss_2, gauss_1)
Or in case of multistage smoothing:
>>> import numpy as np
>>> from astropy.modeling.models import Lorentz1D
>>> from astropy.convolution import convolve, Gaussian1DKernel, Box1DKernel
>>> rng = np.random.default_rng()
>>> lorentz = Lorentz1D(1, 0, 1)
>>> x = np.linspace(-5, 5, 100)
>>> data_1D = lorentz(x) + 0.1 * (rng.random(100) - 0.5)
>>> gauss = Gaussian1DKernel(3)
>>> box = Box1DKernel(5)
>>> smoothed_gauss = convolve(data_1D, gauss)
>>> smoothed_gauss_box = convolve(smoothed_gauss, box)
You would rather do the following:
>>> gauss = Gaussian1DKernel(3)
>>> box = Box1DKernel(5)
>>> smoothed_gauss_box = convolve(data_1D, convolve(box, gauss))
Which, in most cases, will also be faster than the first method because only one convolution with the often times larger data array will be necessary.
Discretization#
To obtain the kernel array for discrete convolution, the kernel’s response
function is evaluated on a grid with
discretize_model(). For the
discretization step the following modes are available:
Mode
'center'(default) evaluates the response function on the grid by taking the value at the center of the bin.>>> from astropy.convolution import Gaussian1DKernel >>> gauss_center = Gaussian1DKernel(3, mode='center')
Mode
'linear_interp'takes the values at the corners of the bin and linearly interpolates the value at the center:>>> gauss_interp = Gaussian1DKernel(3, mode='linear_interp')
Mode
'oversample'evaluates the response function by taking the mean on an oversampled grid. The oversample factor can be specified with thefactorargument. If the oversample factor is too large, the evaluation becomes slow.
>>> gauss_oversample = Gaussian1DKernel(3, mode='oversample', factor=10)
Mode
'integrate'integrates the function over the pixel usingscipy.integrate.quadandscipy.integrate.dblquad. This mode is very slow and is only recommended when the highest accuracy is required.
>>> gauss_integrate = Gaussian1DKernel(3, mode='integrate')
Especially in the range where the kernel width is in order of only a few pixels,
it can be advantageous to use the mode oversample or integrate to
conserve the integral on a subpixel scale.
Normalization#
The kernel models are normalized per default (i.e.,
\(\int_{-\infty}^{\infty} f(x) dx = 1\)). But because of the limited kernel
array size, the normalization for kernels with an infinite response can differ
from one. The value of this deviation is stored in the kernel’s truncation
attribute.
The normalization can also differ from one, especially for small kernels, due
to the discretization step. This can be partly controlled by the mode
argument, when initializing the kernel. (See also
discretize_model().) Setting the
mode to 'oversample' allows us to conserve the normalization even on the
subpixel scale.
The kernel arrays can be renormalized explicitly by calling either the
normalize() method or by setting the normalize_kernel argument in the
convolve() and
convolve_fft() functions. The latter
method leaves the kernel itself unchanged but works with an internal normalized
version of the kernel.
Note that for RickerWavelet1DKernel
and RickerWavelet2DKernel there is
\(\int_{-\infty}^{\infty} f(x) dx = 0\). To define a proper normalization,
both filters are derived from a normalized Gaussian function.